焊接電流是影響焊絲熔化和焊縫熔深的主要焊接參數(shù),一般在焊接過(guò)程控制中常作為恒定的設(shè)定參數(shù)來(lái)考慮。通常焊接電流是由送絲特性曲線(xiàn)與焊接電源外特性交點(diǎn)所決定的,在調(diào)節(jié)外特性曲線(xiàn)位置而調(diào)整電弧電壓時(shí),焊接電流就會(huì)隨電壓值的變化而偏離原來(lái)的設(shè)定值。焊接電路和電弧電壓這兩個(gè)主要的規(guī)范參數(shù)之間的關(guān)系是一種非線(xiàn)形的耦合關(guān)系,利用人工想很快使焊接電流回復(fù)到原設(shè)定值是很困難的[1]。另外,由于網(wǎng)絡(luò)電壓的波動(dòng)、保護(hù)氣體純度、流量以及焊炬高度的變化等都引起焊接電流的波動(dòng)。雖然焊機(jī)本身具有的自身調(diào)節(jié)作用,但都會(huì)給焊接電流帶來(lái)一定的誤差。針對(duì)以上情況,本文研制了一種以可編程控制器(PLC)為核心器件并自主開(kāi)發(fā)的軟件,實(shí)現(xiàn)穩(wěn)定行CO2焊焊接電流的模糊控制器。
模糊控制器具有良好控制效果的關(guān)鍵是具有一個(gè)完善的控制規(guī)則。但對(duì)于高階、非線(xiàn)性、大時(shí)滯、時(shí)變以及隨機(jī)干擾嚴(yán)重的復(fù)雜被控過(guò)程,僅靠對(duì)操作者實(shí)踐經(jīng)驗(yàn)的總結(jié)或模糊控制信息的歸納,很難設(shè)計(jì)出適合被控過(guò)程不同運(yùn)行狀態(tài)的控制規(guī)則。
為此,本文不采用Mamdani規(guī)則表,而是在基本模糊控制器的設(shè)計(jì)基礎(chǔ)上,設(shè)計(jì)了一種帶修正函數(shù)自尋優(yōu)模糊控制器(如圖1),
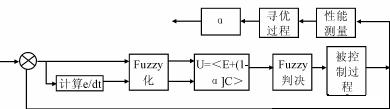
它是一種自組織的模糊控制器[2];并對(duì)所設(shè)計(jì)的模糊控制器使用MATLAB(含SIMULINK)軟件進(jìn)行仿真。
2 模糊控制器的設(shè)計(jì)
2.1 ei,ei/dt和ui基本論域的確定
由送絲特性曲線(xiàn)可知,當(dāng)焊接電流在短路與過(guò)渡(小規(guī)范)范圍內(nèi),電壓每秒變化一伏,電流變化在幾安培之內(nèi),當(dāng)進(jìn)行中規(guī)范焊接時(shí),電弧電壓變化一伏,電流變化最大可達(dá)十幾安培。
本程序把ei在小規(guī)范論域設(shè)定為[-10~+10A];ei在中規(guī)范論域設(shè)定為[-30~+30A];ei在大規(guī)范論域設(shè)定為[-60~+60A]。
在PLC系統(tǒng)中ei/dt可以寫(xiě)為[e(k)-e(k-1)]/Δt。Δt是指掃描時(shí)間,對(duì)于某一個(gè)確定的程序而言,掃描一次的時(shí)間是相同的,因此可以把它設(shè)為一個(gè)常數(shù),用[e(k)-e(k-1)]的大小近似地代表dei/dt.[e(k)-e(k-1)]的范圍可估計(jì)為:0≤|[e(k)-e(k-1)]|≤2max[|e(k)|-|e(k-1)|],所以可以取dei/dt的基本論域分別為:[-20A/s+20A/s];[-60A/s+60A/s];[-120A/s+120A/s]。
為了便于編寫(xiě)程序,對(duì)小、中、大的ei和ei/dt的論域分別給上一個(gè)合適的比例因子k1、k2、k3。取:k1=3 k2=1 k3=1/2;得到ei和ei/dt的統(tǒng)一的格式為[-30,+30],[-60,+60]。
ei是每次采集得到的u(k)與給定值之差,所以u(píng)i的論域可取與ei的相似論域,即為[-30,+30]。
2.2 輸入輸出的語(yǔ)言變量
在工程實(shí)際中,語(yǔ)言變量權(quán)m一般取為5~10檔,結(jié)合本系統(tǒng)的具體的性能,本控制器取為5檔。離散的語(yǔ)言變量論域中元素個(gè)數(shù)n與m的關(guān)系為:n=(1.5-2)m,因此n可取為9,從而ei,ei/dt和ui的語(yǔ)言變量論域E,Ec,U分別為:
[-4,-3,-2,-1,0,+1,+2,+3,+4]
與此對(duì)應(yīng)偏差量化因子為0.1;偏差變化率量化因子為0.05;輸出量化因子為0.1。
2.3 模糊控制器的規(guī)則
假設(shè)被控對(duì)象的實(shí)際動(dòng)態(tài)過(guò)程可用下式描述:
Y(K)+a1Y(K-1)+…+anY(K-n)=b1U(K-m-1)+…bnU(K-m-n)+e(K)+c1e(K-1)+…+cne(K-n) (1)
式中U(K),Y(K)分別為被控對(duì)象的輸入和輸出;e(K)為噪聲干擾率明表示被控對(duì)象的傳輸延時(shí);ai,bi,ci(i=1,2,…n)為各項(xiàng)系數(shù)。#p#分頁(yè)標(biāo)題#e#
設(shè)計(jì)一個(gè)預(yù)報(bào)模型,即根據(jù)K時(shí)以前的數(shù)據(jù)Y(K),Y(K-1),…和U(K),U(K-1),…來(lái)預(yù)報(bào)Y(K+m+1),其中m=0,1,2,…。根據(jù)自適應(yīng)控制理論,預(yù)報(bào)模型的方程為:
Y(K+m+1)+α1Y(K)+…αpY(K-p-1)=β0U(K)+β1(K-1)+…+βUL(K-L)+∈(K+m+1) (2)
式中∈(K+m+1)為預(yù)報(bào)模型的偏差,令向量XT(K)=[-Y(K),-Y(K-1),]…-Y(K-p+1),U(K-1),…,U(K-L);
定義參數(shù)向量θT=[α1,α2,…,αp,β1,…,βL],則式(2)
可簡(jiǎn)化為:Y(K)=β0U(K-m-1)+XT(K-m-1)θ+∈(K) (3)
對(duì)于參數(shù)向量θ的估計(jì),可以采用簡(jiǎn)單的最小二乘遞推法,其遞推形式為:
θ(K+1)=θ(K)+R(K)[Y(K)-β0U(K-m-1)-X(K-m-1)θ(K)]
R(K)=P(K)X(K-m-1)[1-X(K-m-1—)P(K)X(K-m-1)]-1?
P(K+1)=P(K)-P(K)[1+XT(K-m-1)P(K)X(K-m-1)RT(K)] (4)
式中,θ(K)和θ(K+1)表示在K和(K+1)采樣時(shí)刻的參數(shù)向量θ的估計(jì)量
;P(K)是m×m階矩陣,它的維數(shù)取決于未知參數(shù)的數(shù)目,而與測(cè)量次數(shù)無(wú)關(guān)。
因此,可由式(4)求出Y(K)的預(yù)報(bào)值,從而求出預(yù)測(cè)誤差e和誤差的變化率ec。若給定值為R,則:
e=Y(K)-R,ec=Y(K-1)-Y(K) (5)
將e和ec整量化及模糊化后,可得帶有調(diào)整因子的規(guī)則可調(diào)的Fuzzy控制規(guī)則:
U=-[αe+(1-α)ec] (6)
式中,U為控制量U的整量值;α為調(diào)整因子,又稱(chēng)加權(quán)系數(shù),α∈(0,1)。
α值的大小,直接反映了對(duì)偏差e和偏差變化率Δe的加權(quán)程度。因此,上式通過(guò)調(diào)整單一因子的值,就可以很方便地修改控制規(guī)則,以改善系統(tǒng)的控制效果。但這種規(guī)則的單因子自調(diào)整方法存在一些不足,就是其控制規(guī)則只依賴(lài)一個(gè)α參數(shù);一旦確定α,則偏差e和偏差變化率Δe的權(quán)重就確定了。在實(shí)際中控制系統(tǒng)處于不同工作狀態(tài)時(shí),要求e和Δe的權(quán)重不同;當(dāng)e的絕對(duì)值較大時(shí),控制系統(tǒng)的主要矛盾是消除e,故此時(shí)應(yīng)增大α值,使e在控制規(guī)則中占較大的權(quán)重,以改善系統(tǒng)的動(dòng)態(tài)特性;當(dāng)e的絕對(duì)值較小時(shí),控制系統(tǒng)的主要矛盾是抑制系統(tǒng)超調(diào),使系統(tǒng)盡快達(dá)到穩(wěn)態(tài),故此時(shí)應(yīng)減小α值,而1-α值則相應(yīng)增大,使Δe在控制規(guī)則中占較大的權(quán)重。用單因子調(diào)整控制規(guī)則顯然無(wú)法實(shí)現(xiàn)系統(tǒng)狀態(tài)變化的需要。
為了克服單因子自調(diào)整的不足,根據(jù)偏差的量化值的大小,提出了一個(gè)多因子自調(diào)整控制規(guī)則的算式:
采用帶修正因子的控制規(guī)則,即使是采用五因子修正算式,α(i=1-5)值選取仍有較大的盲目性,往往是先憑經(jīng)驗(yàn)預(yù)定出α的若干個(gè)不同的取值,再逐一對(duì)它們進(jìn)行實(shí)驗(yàn)仿真,以選擇最優(yōu)值。這種方法既耗時(shí)又繁瑣,而且往往選不到真正最優(yōu)的α值。因此還需要設(shè)計(jì)一種修正因子自尋優(yōu)的模糊控制器,它能在系統(tǒng)控制過(guò)程中對(duì)α進(jìn)行實(shí)時(shí)自尋優(yōu),以實(shí)現(xiàn)控制規(guī)則的自調(diào)整和自完善,達(dá)到提高控制系統(tǒng)品質(zhì)的目的。
帶修正因子自尋優(yōu)的模糊控制系統(tǒng)結(jié)構(gòu)如圖1所示,其中通常是取:J=∫∞0t|e|dt為目標(biāo)函數(shù),并以目標(biāo)函數(shù)的值為最小作為系統(tǒng)的性能指標(biāo),而且用修正因子α為尋優(yōu)參數(shù)。尋優(yōu)過(guò)程是針對(duì)被控過(guò)程的運(yùn)行狀況,根據(jù)目標(biāo)函數(shù)值的大小不斷地對(duì)因子α進(jìn)行修正,使目標(biāo)函數(shù)值逐步減小,直到系統(tǒng)的控制性能達(dá)到要求為止。若運(yùn)行狀況發(fā)生新的變化,則需重新執(zhí)行尋優(yōu)過(guò)程,直到調(diào)整出適合新運(yùn)行狀態(tài)設(shè)為修正因子。#p#分頁(yè)標(biāo)題#e#
在對(duì)給定的輸入響應(yīng)求目標(biāo)函數(shù)值時(shí),由于用計(jì)算機(jī)組成的模糊控制系統(tǒng)是一個(gè)離散系統(tǒng),故應(yīng)把目標(biāo)函數(shù)J化為離散算式:
J=Σ〖DD(〗?n〖〗i=1〖DD)〗iT|e(i)|T?=Σ〖DD(〗?n〖〗i=1〖DD)〗iT?2|e(i)|〖JZ)〗〖JY〗(8)
其中:T是采樣周期,i是采樣序號(hào)。
如果把采樣周期T看成單位時(shí)間,則可取T=1。式(8)可寫(xiě)為:
J=Σ〖DD(〗N〖〗I=1〖DD)〗i|e(i)|〖JZ)〗〖JY〗(9)
這樣,只要先憑經(jīng)驗(yàn)選擇一組初始修正因子α={α?1,α?2,α?3,α?4,α5},得出一組初始的控制規(guī)則來(lái)對(duì)被控對(duì)象進(jìn)行控制,然后對(duì)系統(tǒng)響應(yīng)的過(guò)度過(guò)程進(jìn)行采樣,即可用式(9)求出目標(biāo)函數(shù)J的值。
在求得系統(tǒng)的目標(biāo)函數(shù)值后,在應(yīng)用尋優(yōu)算法進(jìn)行修正因子α的在線(xiàn)自尋優(yōu),使目標(biāo)函數(shù)值J?=min或達(dá)到給定值為止。此時(shí)的?α??={α?1??,α?2??,α?3?,α?4??,α?5??}為最優(yōu)修正因子,系統(tǒng)的特性也達(dá)到了最優(yōu),其中的尋優(yōu)算法可采用單純算法(其方法在自動(dòng)控制理論相關(guān)的書(shū)籍上都有介紹)。
2.4 模糊控制表的完成
當(dāng)選用不同的修正因子時(shí),根據(jù)公式(7)就會(huì)得到不同的模糊控制規(guī)則而形成不同的模糊控制表。對(duì)于弧焊電源這樣一個(gè)典型的被控對(duì)象,其傳遞函數(shù)假定為:G(s)=1/s(s+1)。設(shè)給定的輸入為單位階躍輸入信號(hào),現(xiàn)采用修正因子自尋優(yōu)方法對(duì)以上對(duì)象進(jìn)行控制。為了得到最優(yōu)的α值,首先憑經(jīng)驗(yàn)預(yù)定出5個(gè)不同的取值α?1=0.3,α?2=0.4,α?3=0.5,α?4=0.6和α?5=0.7;再以式(9)表示的J為尋優(yōu)目標(biāo),采用單純形法作為尋優(yōu)方法,經(jīng)過(guò)多次調(diào)整最終找到J=min的最優(yōu)修正因子為:?α?1??=0.28,α?2??=0.50,α?3??=0.66,α?4??=0.79,α?5??=0.93。?
2.5 模糊控制輸出量的反模糊化
將上面得到的控制量的論域乘以比例因子,便可得到實(shí)際的控制增量,加上原來(lái)的控制量,輸出去控制被控對(duì)象。若在(4)的基礎(chǔ)上,不對(duì)輸入輸出量進(jìn)行量化,而對(duì)所得到的一組優(yōu)化修正因子進(jìn)行曲線(xiàn)擬合,得到修正因子的連續(xù)表達(dá)式,則可獲得連續(xù)的輸出量。對(duì)修正因子進(jìn)行擬合運(yùn)算的模糊控制系統(tǒng)見(jiàn)圖1。這樣可消除量化誤差和調(diào)節(jié)死區(qū)。
綜上所述,帶修正因子的自組織模糊控制器可以?huà)侀_(kāi)控制表,把模糊控制規(guī)則綜合成一個(gè)簡(jiǎn)單算式,直接求取控制量,并可以根據(jù)系統(tǒng)的運(yùn)行狀態(tài),通過(guò)調(diào)整α值,很方便地進(jìn)行在線(xiàn)調(diào)整控制規(guī)則,以改善系統(tǒng)的控制性能。因此這是一種既方便又有效的自組織模糊控制器,特別適合于工程上應(yīng)用。
3 模糊控制器的仿真和分析
由于模糊控制器的設(shè)計(jì)思想是模擬人腦的思考過(guò)程,在模糊控制器的設(shè)計(jì)過(guò)程中,對(duì)實(shí)際經(jīng)驗(yàn)的依賴(lài)性很大,要求設(shè)計(jì)者結(jié)合實(shí)際經(jīng)驗(yàn),選取控制量,設(shè)計(jì)控制規(guī)則。選取的某些控制量和控制規(guī)則的效果如何,必須編制大量的程序進(jìn)行仿真分析,或者是等到控制器完成以后通過(guò)實(shí)際來(lái)觀察、驗(yàn)證。顯然,這兩種方法都費(fèi)時(shí)費(fèi)力,而且都必須通過(guò)大量實(shí)驗(yàn)才能確定,實(shí)際設(shè)計(jì)過(guò)程中,類(lèi)似的工作往往占總工作量的大部分。針對(duì)上面的情況,本文使用MATLAB(含SIMULINK)軟件進(jìn)行仿真。
3.1 SIMULINK中的模型的創(chuàng)建方法
一般模型元件的創(chuàng)建,關(guān)鍵在S函數(shù)的正確編制及調(diào)用。S函數(shù)實(shí)質(zhì)上是具有特殊調(diào)用格式的MATLAB函數(shù),表征系統(tǒng)動(dòng)態(tài)特性,能使SIMULINK有能力構(gòu)造一般的仿真方框圖,靈活方便的設(shè)計(jì)出用戶(hù)的特殊環(huán)節(jié)。
實(shí)際上,SIMULINK的每一個(gè)模型都可以用輸入、輸出、狀態(tài)三個(gè)要素進(jìn)行描述:
function[sys,x0]=sfunc(t,x,u,flag,參數(shù)1,參數(shù)2,…)??[3]?#p#分頁(yè)標(biāo)題#e#
其中,sfunc是用戶(hù)定義的系統(tǒng),t是當(dāng)前時(shí)刻,x是當(dāng)前狀態(tài)值,x0是初始狀態(tài)值,u是當(dāng)前系統(tǒng)輸出值,變量flag的值返回變量sys的信息。
模糊控制原理如圖1所示。其中具有調(diào)整因子的模糊控制環(huán)節(jié),用S函數(shù)描述如下:
zt fuzzy.m
function[sys,x0]=zt fuzzy(t,x,u,flag,ke,kc,ku,a)
if abs(flag)=3
E=round(ke*u(1));
C=round(ke*u(2));
Sys=ku*(a*E (1-a)*c);
Else if flag=0
Sys=[0;0;1;2;0;0];
Elae
Sys=[];
End
將上述S函數(shù)進(jìn)行成組(Group)和封裝(Mask)處理,就得到用戶(hù)創(chuàng)建的SIMULINK模塊。在系統(tǒng)仿真中新模塊與SIMULINK提供的標(biāo)準(zhǔn)模塊功能完全一樣,具有相同的仿真效率及可信度。
3.2 模糊控制器的仿真及分析
將上述S函數(shù)經(jīng)過(guò)封裝處理后,在SIMULINK模型庫(kù)中找出與設(shè)計(jì)的系統(tǒng)相對(duì)應(yīng)的模塊,把它們拖到新模型窗口中,用線(xiàn)連接起來(lái)就可以創(chuàng)建一個(gè)如圖2示的模糊系統(tǒng)模型圖。
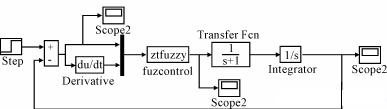
利用該模型就可以對(duì)所設(shè)計(jì)模糊控制系統(tǒng)進(jìn)行仿真研究。圖中ZTFUZZY模塊是自建的
模糊調(diào)節(jié)器模型,圖中step是仿真時(shí)輸入的階躍信號(hào),焊接電流的傳遞函數(shù)假設(shè)為:?G(s)=1/s?(s+1)?,圖中的示波器scope的作用是實(shí)時(shí)的畫(huà)出控制系統(tǒng)的輸出結(jié)果曲線(xiàn),也可以將數(shù)據(jù)存儲(chǔ)到MATLAB的工作空間中,再利用繪圖plot命令將輸出曲線(xiàn)在單獨(dú)窗口畫(huà)出來(lái)。
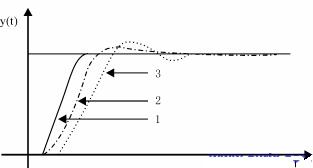
采用多修正因子的自調(diào)整規(guī)則進(jìn)行控制仿真的結(jié)果如圖3所示。其中曲線(xiàn)3對(duì)應(yīng)于五個(gè)修正因子α?1=0.3,α?2=0.4,α?3=0.5,α?4=0.6和α?5=0.7時(shí)控制系統(tǒng)的單位階躍相應(yīng),曲線(xiàn)2應(yīng)于五修正因子α?1??=0.28,α?2??=0.50,α?3??=0.66,α?4??=0.79,α?5??=?0.93?時(shí)控制系統(tǒng)的單位階躍相應(yīng),而曲線(xiàn)1是系統(tǒng)在線(xiàn)調(diào)整修正因子時(shí)控制系統(tǒng)的相應(yīng)曲線(xiàn)。由圖可見(jiàn),離線(xiàn)優(yōu)化的因子(曲線(xiàn)2)的控制較未優(yōu)化(曲線(xiàn)3)的控制效果要好,而在線(xiàn)調(diào)整因子(曲線(xiàn)1)控制效果最好,超調(diào)最小,相應(yīng)時(shí)間最短。但由于在線(xiàn)優(yōu)化給控制器增加了負(fù)擔(dān),使實(shí)時(shí)效果降低。
4 結(jié)論
1)所設(shè)計(jì)的穩(wěn)定CO?2焊焊接電流模糊控制器不僅可以有效的消除電弧電壓調(diào)節(jié)過(guò)程中所引起的焊接電流的偏差,而且也可以消除網(wǎng)絡(luò)電壓波動(dòng)、保護(hù)氣體純度或流量以及焊炬高度變化所引起的偏差。
2)設(shè)計(jì)焊接電流的帶修正函數(shù)自尋優(yōu)模糊控制器的穩(wěn)定性好,階躍響應(yīng)的超調(diào)小,動(dòng)態(tài)響應(yīng)快。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書(shū)Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國(guó)專(zhuān)業(yè)技術(shù)人員計(jì)算機(jī)應(yīng)用能力考試用書(shū) AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開(kāi)始AutoCAD 2014中文版機(jī)械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開(kāi)始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實(shí)例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實(shí)拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計(jì)案例教程中文版AutoCAD 建筑設(shè)計(jì)案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機(jī)械A(chǔ)utoCAD 項(xiàng)目教程 第3版 [繆希偉 主編] 2012年P(guān)DF