(2)斗桿液壓缸受力分析
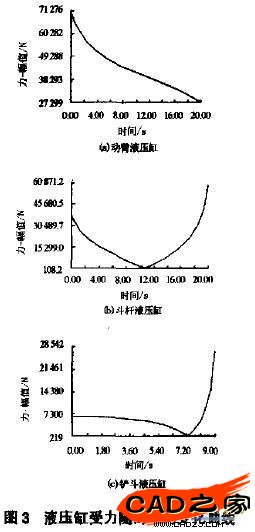
分析在圖2中斗桿運動時,斗桿液壓缸的受力大小,此時動臂靜止不動,鏟斗隨斗桿一起運動,需將動臂液壓缸、鏟斗液壓缸的運動部分附著在各液壓缸的基座上,使這2個液壓缸在仿真時不能伸縮。在鏟斗上施加0.5 t的重量,以模擬挖掘貨物的的重量。然后給斗桿液壓缸約束施以一定速度的沿Z方向的平移,注意運動方向,應使斗桿向下彎曲,并控制仿真時間,使斗桿能夠運動到規定位置,然后分析在此過程中斗桿液壓缸驅動力幅值的大小,如圖3所示。由圖3(b)可以看出,隨斗桿的彎曲,受力先減小后增加,當斗桿完全彎曲到動臂下方時.液壓缸受力最大為印871.2N,因此在設計時,可根據該位置的受力來選取斗桿液壓缸。

(3)鏟斗液壓缸受力分析
分析在圖2中鏟斗運動時,鏟斗液壓缸的受力大小,此時動臂、斗桿靜止不動。需將動臂液壓缸、斗桿液壓缸的運動部分附著在各液壓缸的基座上,使這2個液壓缸在仿真時不能伸縮。在鏟斗上施加0.5 t的重量.以模擬挖掘貨物的的重量。然后給鏟斗液壓缸約束施以一定速度的沿Z方向的平移,注意運動方向,應使鏟斗向下彎曲,并控制仿真時間,使鏟斗能夠運動到規定位置,然后分析在此過程中鏟斗液壓缸驅動力幅值的大小,如圖3所示。由圖3(c)可以看出,隨鏟斗的彎曲,受力先逐漸減小后急劇增加.當斗桿完全彎曲到斗桿下方時,液壓缸受力最大為28 542 N,因此在設計時,可根據該位置的受力來選取鏟斗液壓缸。
4結語
使用COSMOSMotion對挖掘機進行動態力學仿真.使液壓缸的選擇變得非常容易,由于COSMOSMation是SolidWorks的插件,因此在利用SolidWorks設計完畢后,不用退出,就可以立即進行力學分析和運動仿真,而且分析速度非常快,基本上不用等待,結果也非常直觀,可以在仿真完后,再回放結果,觀察每一個位置狀態所對應的受力大小。特別是在分析后如果不滿意,可以再轉到SolidWorks設計狀態,修改設計參數,而所做的修改會自動映射到COSMOSMotion中,這樣在COSMOSMotion中就不必進行任何修改,直接再分析,大大節省了時間。而且分析結果可以輸出為excel,這樣也可以在excel中查看精確分析結果。
相關文章
- 2021-09-08BIM技術叢書Revit軟件應用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業技術人員計算機應用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應用 制表、數據處理及宏應用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機械制圖基礎培訓教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎培訓教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術設計案例教程中文版AutoCAD 建筑設計案例
- 2021-08-29環境藝術制圖AutoCAD [徐幼光 編著] 2013年PDF下載
- 2021-08-29機械AutoCAD 項目教程 第3版 [繆希偉 主編] 2012年PDF