本文探討研究了機器人焊接系統(tǒng)的離線編程實例。
1 引言
隨著國內(nèi)航天事業(yè)飛速發(fā)展、國際衛(wèi)星發(fā)射市場競爭日趨激烈,對發(fā)動機的生產(chǎn)周期、制造成本,提出了更高的要求。為了適應(yīng)這種形勢,設(shè)法提高焊接接頭質(zhì)量及焊接接頭質(zhì)量的穩(wěn)定性,保證生產(chǎn)周期己成為當務(wù)之急二機器人焊接系統(tǒng)的柔性優(yōu)勢正是解決這種矛盾的良好方案。
2機器人焊接存在的問題
為滿足焊接質(zhì)量的要求,對每·段都需要選擇其中一條焊縫進行機器人編程。目前采用的編程方式為示教編程。操作人員利用示教盒控制機器人運動,使焊槍到達完成焊接作業(yè)所需位姿,并記錄下各個示教點的位姿數(shù)據(jù)。隨后機器人便可以在"再現(xiàn)"狀態(tài)完成這條焊縫的焊接。
根據(jù)前期的試驗,目前存在以下兩方面問題:
(1)示教精度不穩(wěn)定,影響焊接質(zhì)量
在示教過程中,編程效果受操作人員水平及狀態(tài)的影響較大。示教時,應(yīng)盡量保證示教點在焊縫軌跡上,保證合適的焊槍高度,并且要保證焊槍姿態(tài)的連續(xù)變化,對操作人員的水平要求很高。另外,操作人員長時間處在高度精神集中的狀態(tài),很難保證每個示教點的準確。從而使最終的編程精度變得不穩(wěn)定,有時還會發(fā)生焊槍與工件相碰等問題。
(2)編程時間長,焊接效率低
為了保證軌跡的精度,通常在100mm的焊縫上,需要示教50個點,以保證焊接機器人運行平滑及收弧點位置的一致。在每段的在線示教與編程中,需要2小時的時間,即整個產(chǎn)品在示教編程上需要200小時,合計在25個工作日,加大了噴管延伸段的總焊接時間。
因此,如何提高編程的效率及精度,縮短產(chǎn)品總的焊接時間,提高焊接質(zhì)量成為需要迫切解決的問題。
3機器人焊接離線編程技術(shù)
目前的機器人編程可以分為示教編程與離線編程兩種方式。在機器人所要完成的任務(wù)不很復(fù)雜,以及編程時間相對于工作時間米說比較短的情況下,示教編程是有效可行的,但在許多復(fù)雜的作業(yè)應(yīng)用中不是令人滿意。
3. 1機器人離線編程特點
機器人焊接離線編程及仿真技術(shù)是利用計算機圖形學的成果,在計算機中建立起機器人及其工作環(huán)境的模型,通過對圖形的控制和操作,在不使用實際機器人的情況下進行編程,進而產(chǎn)生機器人程序。與傳統(tǒng)的在線示教編程相比,離線編程具有如下優(yōu)點:
a.減少機器人不工作的時間。
b.使編程者遠離危險的工作環(huán)境。
c.便于修改機器人程序。
d.可結(jié)合各種人工智能等技術(shù)來提高編程效率。
e.便于和CADICAM系統(tǒng)結(jié)合,做到CAD/CAM/Robotics一體化。
因此,機器人焊接離線編程及仿真是提高機器人焊接系統(tǒng)柔性化的一項關(guān)鍵技術(shù),是現(xiàn)代機器人焊接制造業(yè)的一個重要發(fā)展趨勢。
3. 2機器人離線編程技術(shù)現(xiàn)狀
目前國際市場上己有基于普通PC機的商用機器人離線編程軟件,如Workspace, ROBCAD, IGRIP等。
Workspace是Robot Simulations公司開發(fā)的第一個商品化的基于微機的機器人仿真與離線編程軟件。該軟件最新版木采用了ACIS作為建模核心,與一些基于微機的CAD系統(tǒng)如AutoCAD做到了很好的數(shù)據(jù)交換。
ROBCAD是美國Tecnomatix公司1986年推出的機器人CAD及仿真系統(tǒng)。短短幾年內(nèi),ROBCAD已在實際工業(yè)系統(tǒng)中得到了廣泛的應(yīng)用,美國福特、德國大眾、意大利菲亞特等多家汽車公司,美國洛克希德宇航局都使用ROBCAD進行機器人生產(chǎn)線的設(shè)計、仿真和離線編程。
美國另一個著名的機器人離線編程與仿真軟件包是IGRIP,它是美國Deneb Robotics公司推出的交互式機器人圖形編程與仿真軟件包,主要用于機器人工作單元布置、仿真及離線編程。IGRIP可在SGI、HP, SUN等工作站上運行。IGRIP軟件分為三個部分:IMS, GSL. GLI。此外,它還通過一個共享庫為用戶提供一些更高級的功能。國內(nèi)在機器人焊接離線編程方面,哈爾濱工業(yè)大學、北京工業(yè)大學、南京理工大學等單位開展了研究工作。其中哈爾濱丁業(yè)大學在十幾年前便開展了研究工作,研究水平在國內(nèi)處于領(lǐng)先地位,相繼開發(fā)出了RAWCAD等機器人弧焊離線編程系統(tǒng),并在一些產(chǎn)品上得到了應(yīng)用。
4機器人離線編程與仿真解決方案
開發(fā)基于SolidWorks平臺的弧焊機器人離線編程與仿真系統(tǒng),實現(xiàn)噴管延伸段焊接過程中的離線編程工作。
4. 1工作流程
a.建立噴管延伸段模胎與管子的CAD模型及機器人模型。
b.對焊縫進行分段并編號,并針對每一段焊縫,利用離線編程系統(tǒng)進行自動編程,包括焊槍軌跡的規(guī)
劃、焊槍姿態(tài)的規(guī)劃。
c.對編程結(jié)果進行仿真,并根據(jù)仿真結(jié)果對規(guī)劃的位姿進行修正。
d.對機器人坐標系進行標定,使其與離線編程系統(tǒng)中的坐標系一致。
e.將離線編程得到的程序轉(zhuǎn)換成Motoman機器人程序,并通過通訊接口或CF卡導入到機器人控制器中。
f.機器人利用離線編制的程序完成工件的焊接。
4. 2三點標定法
三點標定法,分別用到實際工件的三個特征點的空間坐標和虛擬工件的三個特征點的空問坐標。其中,標簽點(X)為標定用坐標系的x軸上的一點標簽點〔Y)為標定用坐標系的y軸上的一點,標簽點(o)為標定用坐標系的原點位置。
4.3實例
4.3.1標定
進行實際機器人的示教,將機器人焊槍示教到工件的三個特征點處,記錄在三個特征點處機器人關(guān)節(jié)角的大小,保存到文件中。再將此蘭組機器人關(guān)節(jié)角文件改寫為機器人程序文件,然后利用"編程器"的程序上載功能上載到離線編程系統(tǒng)中,在"編程器"中控制機器人單步運動,每運動到一點就將機器人末端的位置記錄到相應(yīng)的點中,見圖1。

此處提供了馬鞍形焊縫工件的標定功能,標定過程中需要六個標簽點,上圓三個,下圓三個。各個點的記錄方法和前面的三點標定相同,注意圓上各點的記錄順序應(yīng)該相同,一般為逆時針方向。見圖2。

4.3.2創(chuàng)建焊接接頭特征對象
生成焊接接頭特征對象:a進行名稱檢查;b,進行位姿計算。目前的位姿計算只支持角焊縫,計算原理為:角焊縫的截面為近似倒三角形,整體近似三棱形,在兩個焊板相交的焊縫底部棱邊上生成焊接路徑點,從邊上提取空間位置信息,邊在該點的切線方向為焊縫點的X軸方向,焊縫兩個側(cè)面的法向方向的夾角方向為焊縫點的Z軸方向,Y軸由X,Z叉乘得到。見圖3。

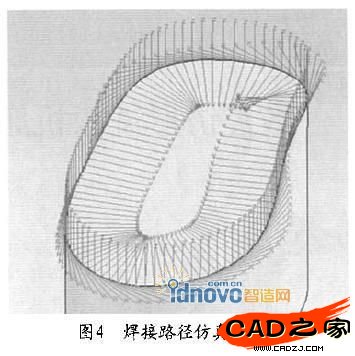
在沒有生成焊縫幾何體的情況下,生成焊接路計算原理和從焊縫幾何體生成焊縫點的原理相見圖4。
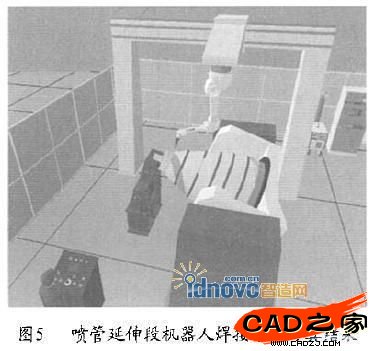
4.3.3噴管延伸段機器人焊接仿真
噴管延伸段機器人焊接系統(tǒng)仿真結(jié)果見圖5。
5結(jié)束語
由于采用離線編程,編程時不影響焊接機器人的正常生產(chǎn)。而且離線編程系統(tǒng)可以進行自動編程,焊槍位置點的選取及焊槍姿態(tài)的過渡會很平滑,編程精度會提高。編程人員通過仿真系統(tǒng),能夠很充觀地檢查編程結(jié)果,并可以進行人工修正。
采用這樣的離線編程系統(tǒng),能夠提高編程效率,減輕編程員的勞動強度,提高產(chǎn)品的生產(chǎn)率及產(chǎn)品的焊接質(zhì)量。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業(yè)技術(shù)人員計算機應(yīng)用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機械制圖基礎(chǔ)培訓教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計案例教程中文版AutoCAD 建筑設(shè)計案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機械A(chǔ)utoCAD 項目教程 第3版 [繆希偉 主編] 2012年P(guān)DF